
Visas „iLive“ turinys yra peržiūrėtas medicinoje arba tikrinamas, kad būtų užtikrintas kuo didesnis faktinis tikslumas.
Mes turime griežtas įsigijimo gaires ir susiejamos tik su geros reputacijos žiniasklaidos svetainėmis, akademinių tyrimų institucijomis ir, jei įmanoma, medicininiu požiūriu peržiūrimais tyrimais. Atkreipkite dėmesį, kad skliausteliuose ([1], [2] ir tt) esantys numeriai yra paspaudžiami nuorodos į šias studijas.
Jei manote, kad bet koks mūsų turinys yra netikslus, pasenęs arba kitaip abejotinas, pasirinkite jį ir paspauskite Ctrl + Enter.
Kaip embrionas „įkanda“ į motinos audinius: pirmą kartą realiuoju laiku nufilmuota implantacijos žmonėms mechanika
Paskutinį kartą peržiūrėta: 23.08.2025
 ">
">Mokslininkai iš Barselonos (IBEC, „Dexeus Mujer“) ir Tel Avivo pirmą kartą realiu laiku ir 3D formatu parodė, kaip žmogaus embrionas prisitvirtina prie „gimdos karkaso“ ir tiesiogine prasme tempia bei pertvarko aplinkinius audinius. Tam jie sukūrė deformuojamą ex vivo platformą (kolageno/ECM gelius) ir tiesiogiai pritaikė traukos jėgos mikroskopiją gyviems žmogaus ir pelės embrionams. Svarbiausias atradimas: jėgų modelis yra specifinis rūšiai, o patys embrionai yra mechaniškai jautrūs: jie reaguoja į išorinius mechaninius signalus pertvarkydami citoskeletą ir keisdami augimo orientaciją.
Tyrimo kontekstas
Implantacija yra žmogaus reprodukcijos „kliūtis“: būtent šiame etape dažniausiai nepavyksta tiek natūralus apvaisinimas, tiek dirbtinio apvaisinimo bandymai. Tuo pačiu metu žmogaus implantacija yra intersticinė: embrionas ne tik „prilimpa“, bet ir visiškai įsitvirtina endometriume – tai biochemiškai ir mechaniškai sudėtingas procesas, tačiau iki šiol beveik nepastebėtas gyvose žmonių sistemose. Todėl sukibimo ir invazijos mechanika liko „juodąja dėže“, o išvados dažnai buvo daromos remiantis netiesioginiais žymenimis arba duomenimis iš gyvūnų modelių.
Klasikinė implantacijos biologija daugiausia rėmėsi pelėmis, tačiau yra esminių skirtumų tarp rūšių – nuo blastocistos orientacijos iki implantacijos gylio ir ląstelių jėgų modelio. Pelėms implantacija yra labiau „paviršutiniška“, kai pirmenybė teikiama audinių poslinkio kryptims; žmonėms ji yra ryškiai invazinė, kai aplink embrioną veikia daugiažidininės traukos jėgos. Šie skirtumai rodo, kad pelių modelis ne visada atitinka žmonių modelius, ypač kalbant apie mechaniką. Reikėjo tiesioginių žmogaus embriono stebėjimų deformuojamoje aplinkoje.
Technologinis proveržis buvo įmanomas sujungus deformuojamas 2D/3D matricas (kolageno/ECM) ir traukos jėgos mikroskopiją su ilgalaikiu aukšto dažnio vaizdavimu. Ši „dirbtinė gimda“ leido tiesiogine prasme pamatyti ir išmatuoti, kaip embrionas traukia, pertvarko ir „gręžia“ aplinkinius audinius – ir kaip jis reaguoja į išorinius mechaninius signalus (mechaninis jautrumas). Tai atveria kelią naujiems implantacijos potencialo vertinimo kriterijams ir embrionų perkėlimo sąlygų tikslinimui.
Taikomas kontekstas: jei mechaninės aplinkos savybės ir embrioninių jėgų modelis yra susiję su implantacijos sėkme, tai IVF atveju galima tikslingai parinkti matricos standumą/sudėtį, atsižvelgti į perkėlimo laiko langus ir netgi naudoti „jėgos“ metriką kaip papildomą atrankos žymeklį. Tuo pačiu metu tokios platformos padės paaiškinti ankstyvųjų nėštumo persileidimų dalį, kai biochemija yra „normali“, bet sukibimo mechanika – ne. Visa tai paverčia tiesioginius žmogaus implantacijos 3D stebėjimus ne tik gražiu vaizdo įrašu, bet ir nauja reprodukcinės medicinos priemone.
Kodėl tai svarbu?
Implantacijos nesėkmė yra viena pagrindinių nevaisingumo priežasčių ir sudaro iki 60 % savaiminių persileidimų. Nepaisant biocheminės pažangos dirbtinio apvaisinimo srityje, šio proceso mechanika žmonėms liko „juodąja dėže“. Naujas požiūris leidžia mums pamatyti embriono implantacijos jėgas ir trajektorijas bei suteikia pagrindą embrionų atrankos ir perkėlimo sąlygoms gerinti.
Kaip tai buvo padaryta
Tyrėjai surinko „dirbtinę gimdą“ – minkštą, skaidrią ir deformuojamą aplinką, kurioje audinį primenanti matrica, veikiama embrioninių jėgų, matomai pasislenka. Toliau sekė nuolatinė mikroskopija ir kompiuterinė skaidulų poslinkių analizė.
- 2D ir 3D platformos: 3D formatu embrionas iš karto įterpiamas į matricą (prisijungimo etapas „aplenkiamas“), todėl galima matyti gręžimą audinio storyje.
- Didelis „išgyvenamumas ir įsiskverbimas“ 3D vaizde: apie 80 % sėkmingos invazijos (ribojamas dėl artumo prie stiklo).
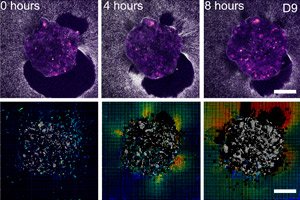
- Traukos žemėlapiai ir skaitmeninė tūrio koreliacija rodo poslinkių aplink embrioną amplitudę ir kryptį – iš esmės jėgos „atspaudą“ laikui bėgant.
Kas tiksliai buvo rasta (trumpai ir punktas po punkto)
1) Rūšiai būdingi implantacijos mechanizmai
- Žmogus: embrionas įterpiamas į matricą, sukuriant daug traukos židinių ir formuojant radialiai vienodus poslinkius aplink save; invazijos gylis siekia iki 200 µm.
- Pelė: embrionas daugiausia plinta paviršiumi su ryškiomis pagrindinėmis poslinkio kryptimis.
2) Embrionas jaučia aplinkos mechaniką
- Išorinės jėgos → atsakymas: žmogaus embrione – miozino ir nukreiptų ląstelių pseudopodijų pritraukimas; pelėje – implantacijos/augimo ašies sukimasis išorinės jėgos šaltinio link (PD ašies orientacija).
- Mechaniškai jautrūs žymenys: pelėje YAP lokalizacijos pokyčiai trofoblastuose; kartu tai rodo mechaniškai jautrią grįžtamojo ryšio grandinę.
3) Implantacijos stiprumo ir sėkmės ryšys
- Mažesnis kolageno poslinkis → blogesnė implantacijos eiga žmogaus embrionuose.
- Integrinai – stiprybės „jungiklis“: RGD peptidų blokada / Src slopinimas pelėms sumažina implantacijos gylį / plotą.
Kaip atrodo įgyvendinimas?
- 2D ir 3D platformose aplink embrioną formuojasi augantis skaidulų poslinkių „aureolė“; traukos žemėlapis pulsuoja, tarsi embrionas „skenuotų“ aplinką.
- Ant stiklo žmogaus embrionas suformuoja plokščią ataugą, tačiau minkštoje matricoje jis išlieka sferiškesnis ir eina giliau – kaip ir gyvuose audiniuose.
Ką tai duoda praktikai (IVF perspektyvos ir ne tik)
Idėja paprasta: implantacija yra ne tik „receptorių chemija“, bet ir sukibimo bei tempimo mechanika. Tai reiškia, kad galime optimizuoti:
- Medžiagos ir terpės kietumas atliekant kultivavimo / implantavimo potencialo tyrimus;
- Nauji embrionų atrankos žymekliai – pagrįsti „išmaniosios“ matricos poslinkių trajektorijomis ir amplitude;
- Gimdos treniravimas / moduliavimas (pvz., švelniais mechaniniais signalais), siekiant pagerinti sukibimą be agresyvių intervencijų.
Dėmesio: ex vivo darbas neatliekamas „gimdos viduje“. Tačiau pats faktas, kad išorinis mechaninis signalas pakeičia implantacijos orientaciją / ašių organizaciją, atveria kelią suasmenintoms embrionų perkėlimo sąlygoms.
Apribojimai
- Ex vivo modelis neatsižvelgia į tikrojo endometriumo imuninę, hormoninę ir kraujagyslių dinamiką;
- Matrigelis/kolagenas apibrėžia savybių rinkinį (standumą, klampumą, sudėtį), jas sunku pakeisti vienu parametru;
- Etiniai žmonių tyrimų apribojimai (iki 14 dienų laikotarpis) riboja ilgalaikį stebėjimą. Tačiau didelis atitikimas žinomiems in vivo implantacijos būdams (intersticinis žmonėms, palyginti su paviršiniu pelėms) padidina modelio patikimumą.
Išvada
Žmogaus embrionas aktyviai „traukiasi“ ir „gręžiasi“ į motinos audinius, o mechaniniai aplinkos signalai gali pakeisti jo elgesį. Jėgų veikimo modelis ir implantacijos strategija žmonėms ir pelėms skiriasi – ir tai gali paaiškinti, kodėl pelių modelis ne visada prognozuoja sėkmingą implantaciją žmonėms. Mechanika dabar yra visavertis ankstyvosios embriologijos ir reprodukcinės medicinos veikėjas.
Šaltinis: Godeau AL ir kt. Traukos jėga ir mechaninis jautrumas lemia rūšiai būdingus implantacijos modelius žmogaus ir pelės embrionuose. „Science Advances“ 11(33): eadr5199 (2025 m. rugpjūčio 15 d.). DOI: 10.1126/sciadv.adr519